9号からは右腕を組み立て始めます。
関節ごとにサーボモーターを含むので、腕組み立てではサーボモータをたくさん繋げていく感じになりそうです。
はやく完成させて、腕をからだと繋げられるところまで行きたいですね。

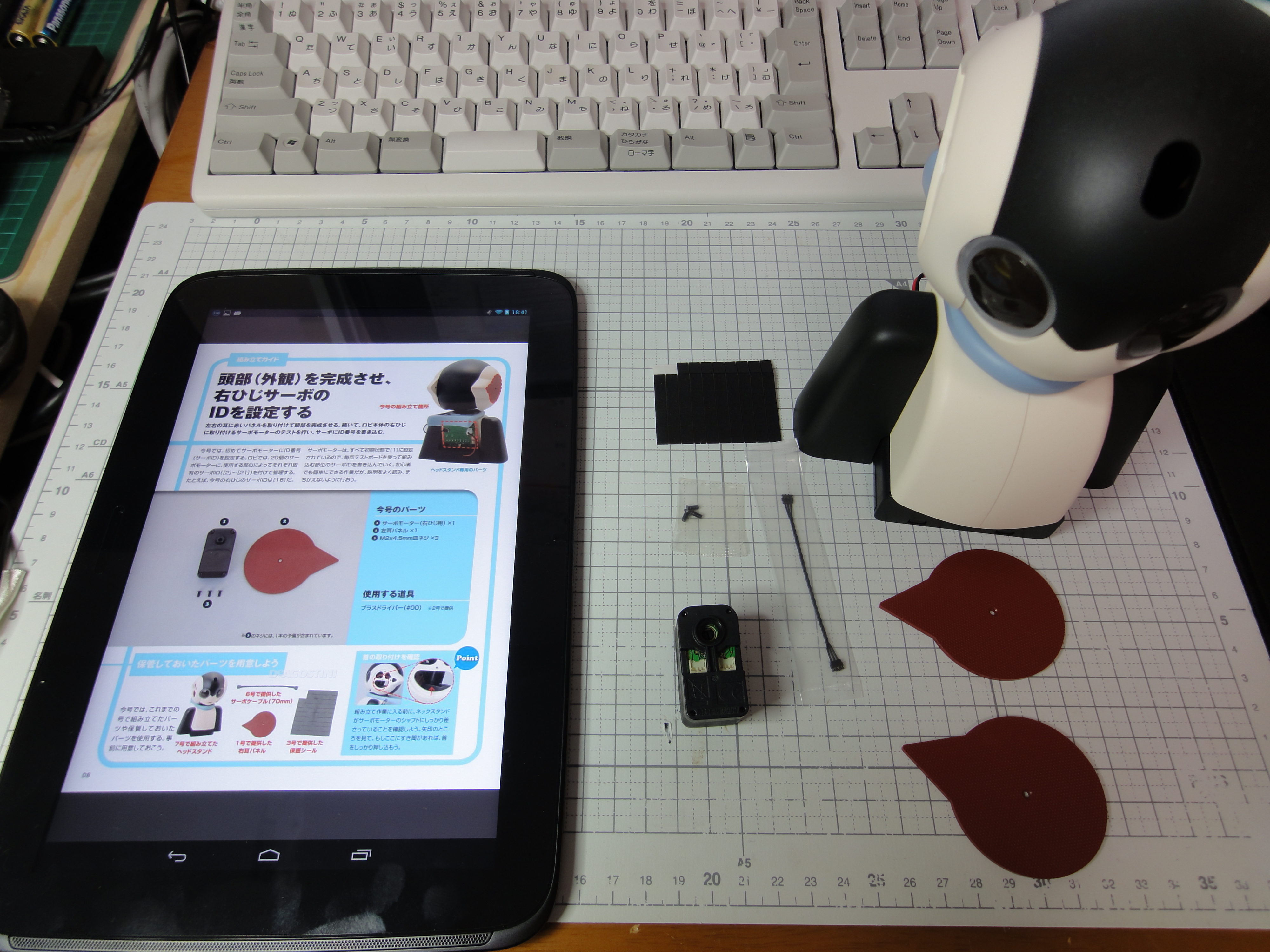
9号のパーツ。黒いのが右腕フレームで白いのが親指です。

指ホルダーの取付。指ホルダーが何なのかはよくわからないが。

こんな感じでネジでとめればOK。

次に親指を付ける。

こんな感じで固定して、裏からネジでとめる。

裏はこうなってる。→が指ホルダー、←が親指。

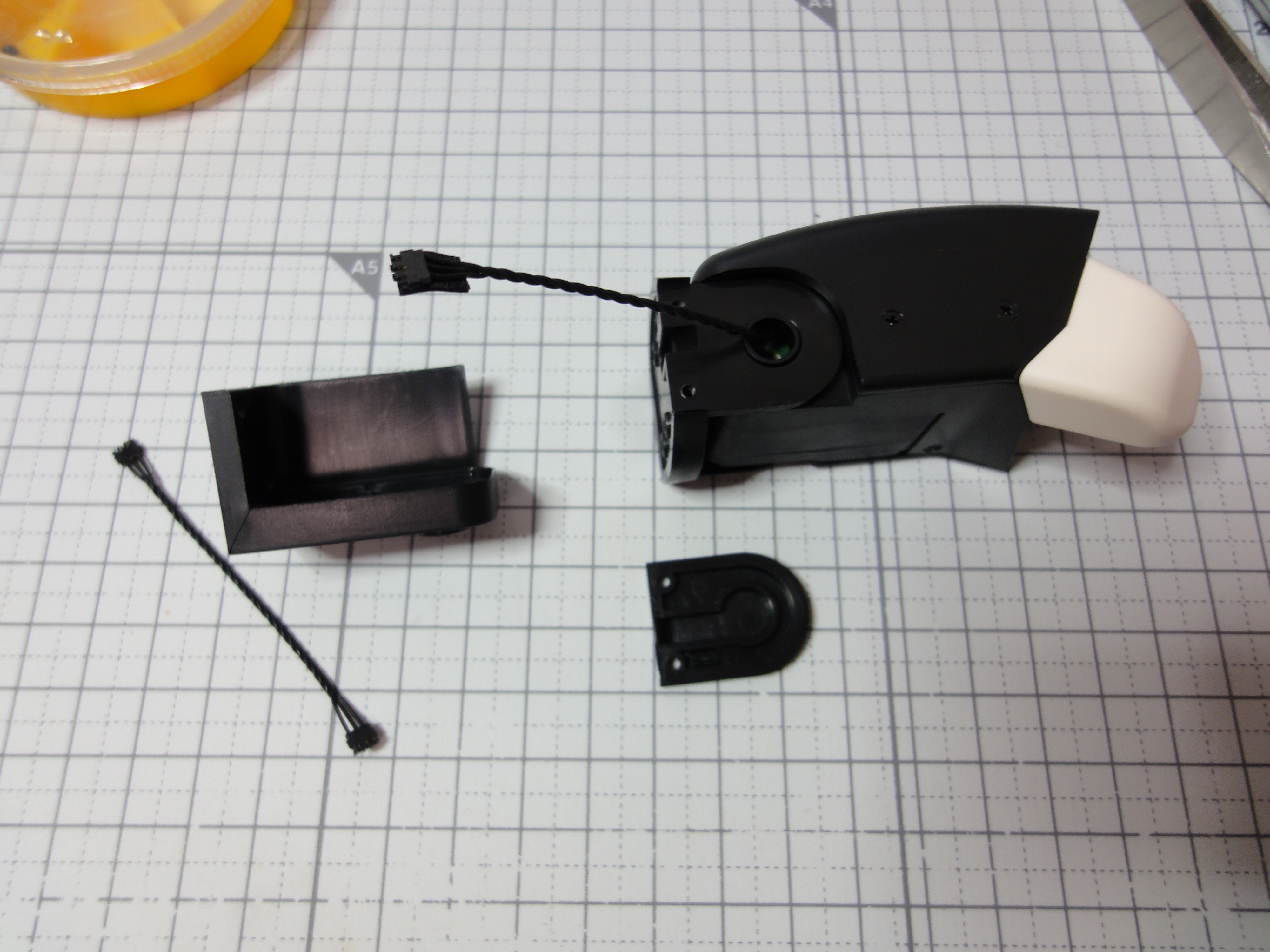
次はサーボの組み込み。

カバーを取って、フレームに付け替える。

サーボをフレームにつけたところ。

サーボの軸に上腕と接続するパーツを。

軸に差し込むパーツ。

こんな感じではめ込む。

もう片方から別のパーツで挟み込む形。

ネジで両パーツをくっつけます。

さらに腕の外側のフレームを

はめ込んだら右腕完成。
0件のコメント