10号では上腕部分を作り始めます。
ここで、初めてサーボ同士をケーブルでつなぐ作業が入ります。
現時点では、サーボ同士をつないだ際の動作確認はできないので、うまく繋がっているか不安ですね。

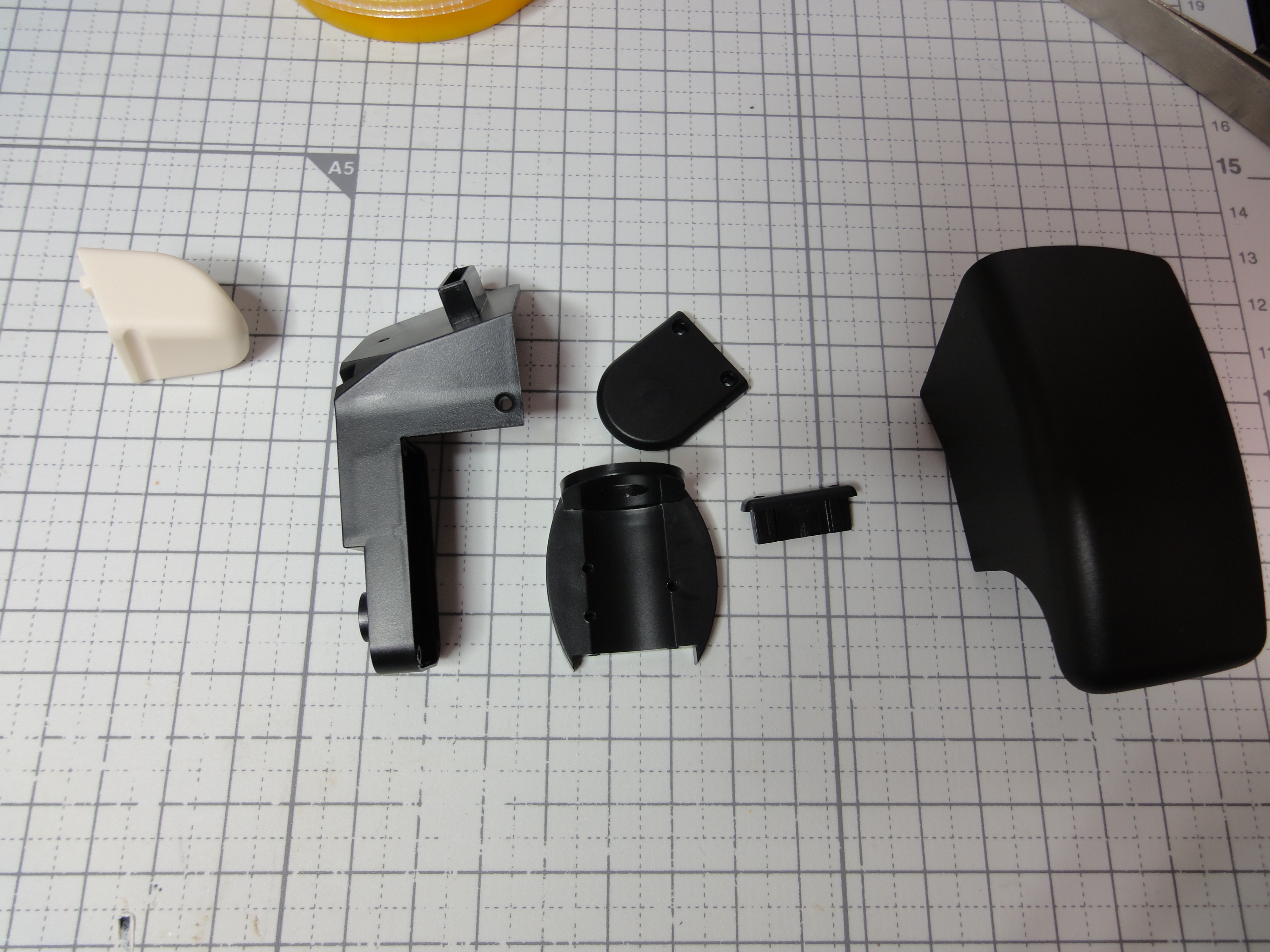
10号で使うパーツたち。

9号で完成した腕のさきっぽに・・・

まずはカバーをねじで留めて付けておく。

そしてさらにこの先に…

上腕パーツを連結

ケーブルが隙間から顔を出す。

腕の外観はこんな風になってます

サーボモータにID=17を書き込んで

先につけたケーブルと接続しつつ、腕に取り付ける。

ケーブルの取り回しが少し要注意な感じ。

そっと嵌め込んで取付完了。
0件のコメント